スマート農業を対象としたAIチップによる実時間映像解析の検討
NEDOプロジェクト
・高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発
・革新的AIエッジコンピューティング技術の開発
・不揮発省電力FPGAコアを用いた低遅延AI処理コンピューティング技術の研究開発
・高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発
・革新的AIエッジコンピューティング技術の開発
・不揮発省電力FPGAコアを用いた低遅延AI処理コンピューティング技術の研究開発
プロジェクトメンバー
- 延原 肇 Hajime Nobuhara
C-AIRヒューマンテクノロジー分野、システム情報系、教授 - 丸山 勉 Tsutomu Maruyama
システム情報系、教授 - 山口 佳樹 Yoshiki Yamaguchi
システム情報系、准教授 - 河合 新 Shin Kawai
システム情報系、助教 - 林 久喜 Hisayoshi Hayashi
生命環境系、教授
研究概要
農業分野、特に、育種分野においては、各植物個体の高さ方向の情報を大規模・高精度に計測する、ハイスループットなフェノタイピングの基盤技術が求められている。しかしながら、図1に示すような規模の圃場には、約50,000個体が生育しており、これを人手で計測するのは非常に困難である。
このボトルネックの解消手段として、ドローンの大規模観測能力に注目が集まっている。一方で、従来のドローンによる計測システムではセンチメートルオーダーが限界であり、さらに撮影画像によっては3次元再構成がうまくゆかない場合もある。
本研究では、FPGAの処理能力を最大限に活用し、ドローンの飛行中に撮影画像からの3次元再構成を行い、3次元再構成がうまく行かない場合に、再撮影をすることを視野に入れ、さらに、計測精度をミリオーダーまで引き上げることを目的としたシステムを開発している。
提案システムの原理は、図2に示すように、ドローンによる画像撮影と、撮影時の地点をRTK-GPSで測位し、当該画像と紐付けることで、各撮影画像間の基線長を推定し、ステレオマッチングによる深度情報を推定する。
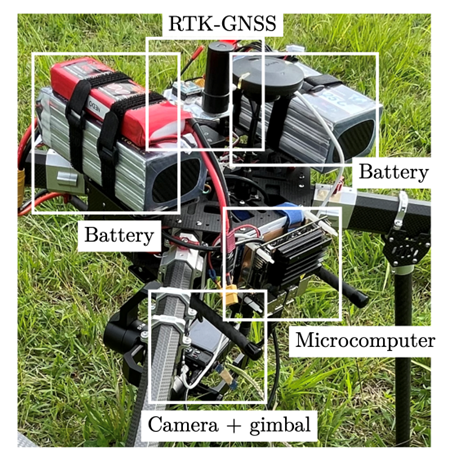
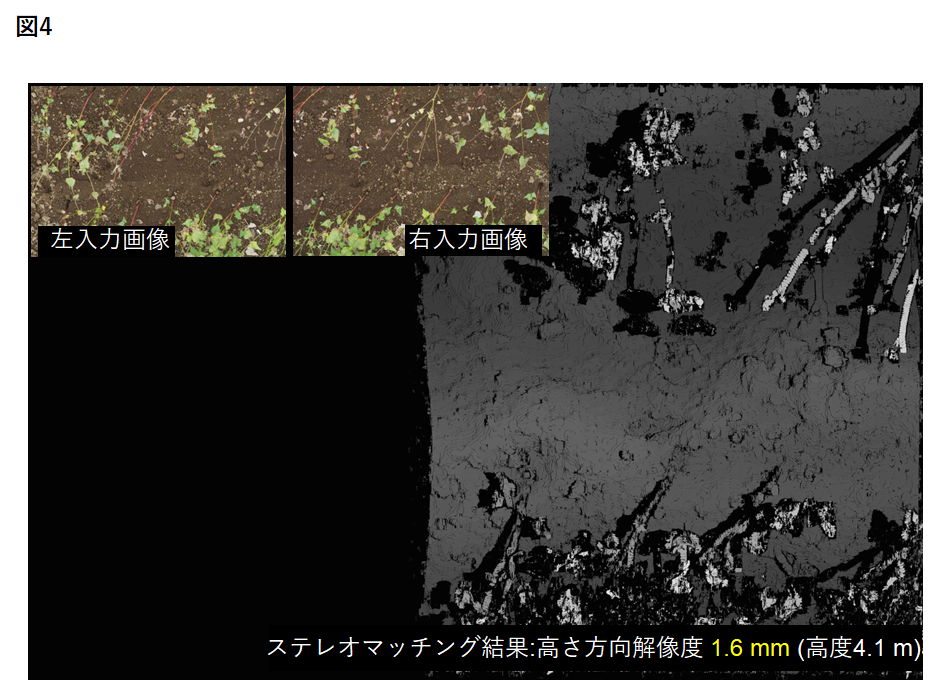
図3に示すドローンを開発し、実圃場において実証実験を行いミリオーダーの精度を確認するとともに、処理時間と計測に必要な入力に関しても、従来に比べ大幅に削減可能であることを示した(図4)。
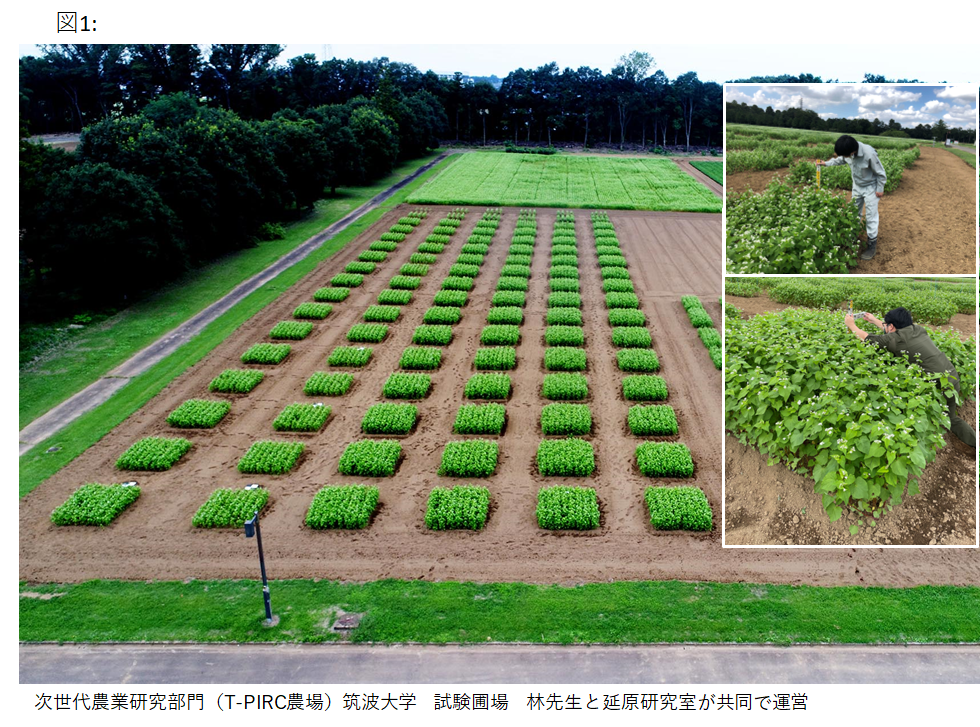
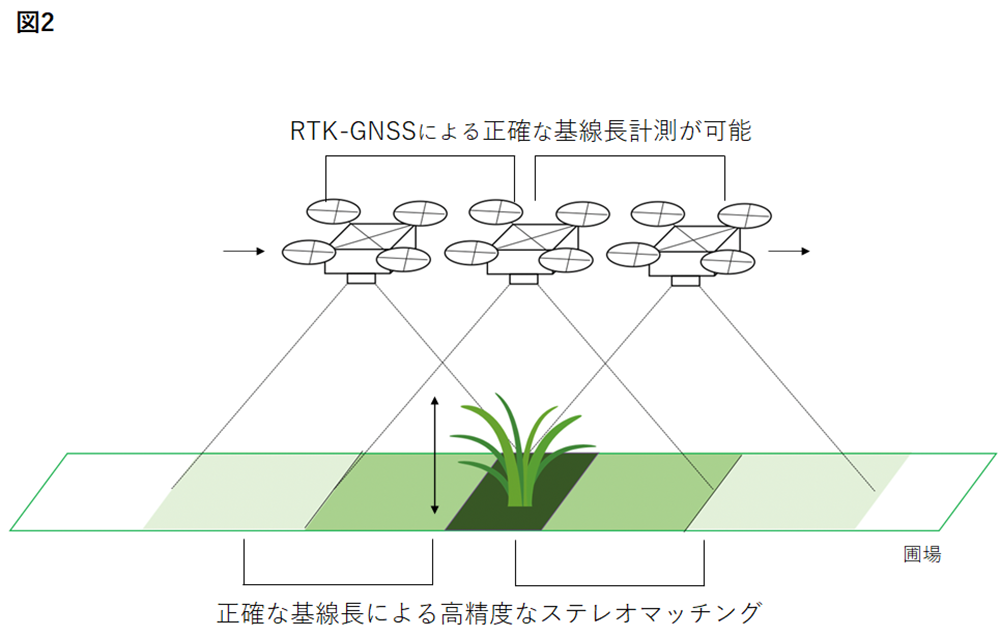
図3